
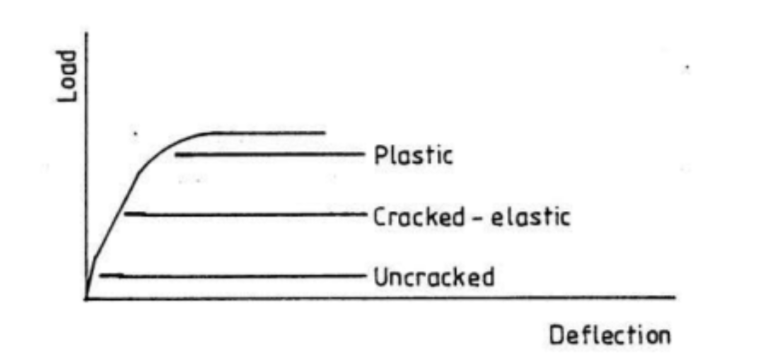
Concrete design in civil engineering is guided by standards like Eurocode 2 and ACI, which help engineers determine the appropriate reinforcement to ensure structural integrity and safety. The underlying principle of concrete design is based on the behavior of concrete under-loading. Reinforced Concrete, the main load-bearing concrete construction material, exhibits three key stages of behavior when loaded from initial loading stages to failure. This post will explore the three key stages of concrete behavior in reinforced concrete sections: Stage I (Uncracked), Stage II (Cracked Serviceability State), and Stage III (Ultimate Limit State).
Key Definitions and Symbols
–  : Characteristic compressive strength of concrete
: Characteristic compressive strength of concrete
–  : Characteristic yield strength of reinforcement steel
: Characteristic yield strength of reinforcement steel
–  : Stress in the reinforcement steel
: Stress in the reinforcement steel
–  : Stress in the concrete
: Stress in the concrete
–  : Depth of the neutral axis
: Depth of the neutral axis
–  : Effective depth of the section
: Effective depth of the section
–  : Area of tensile reinforcement
: Area of tensile reinforcement
–  : Area of compression reinforcement
: Area of compression reinforcement
–  : Bending moment
: Bending moment
–  : Ratio of the neutral axis depth to the effective depth
: Ratio of the neutral axis depth to the effective depth
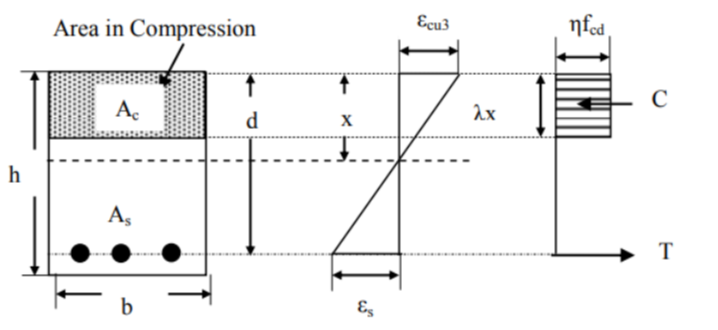
– h = overall depth of the section
-d = effective depth, i.e. depth from the compression face to the centroid of tension steel
-b = breadth of the section
-x = depth to the neutral axis
-fs = stress in steel
-fc = stress in concrete
-As = area of tension reinforcement
-εcu3 = maximum strain in the concrete
-εs = strain in steel
The example focuses on balanced and singly reinforced states for concrete beams.
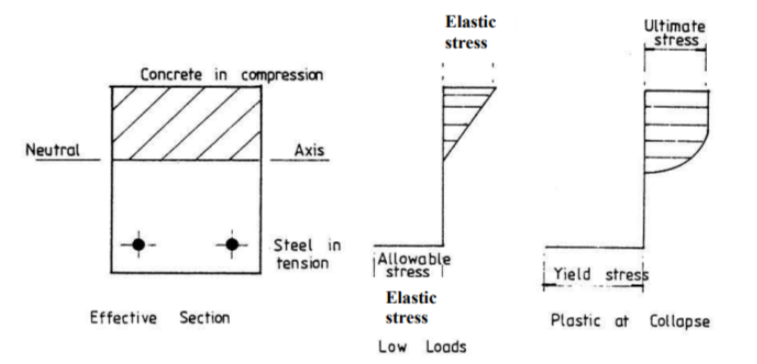
Stage I: Uncracked (Elastic Behavior)
In this initial stage, the concrete section is considered uncracked and behaves elastically under low-stress levels. This state is suitable for cases of small loads and where the cracks are prevented from occurring.
Key Assumptions
– Concrete and steel both respond linearly/elastic under low stresses.
-Bernoulli’s hypothesis is satisfied i.e the strain distribution is linear
-Hooks law is satisfied or the material is elastic: i.e
![\[ \sigma = E \cdot \epsilon\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-870897c374592620fa707855630c501d_l3.png "Rendered by QuickLaTeX.com")
– The entire cross-section contributes to load resistance.
– The tensile strength of concrete is not exceeded, so no cracks develop.
The Naviers equation is used to calculate the stress of steel
-Converting steel area to an equivalent concrete area using a modular ratio
![\[\alpha = \frac{E_s}{E_c}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-d36db6eddb41e2c414e93369e12008b8_l3.png "Rendered by QuickLaTeX.com")
-The neutral axis is x=(α−1)⋅As+bh(α−1)⋅As⋅d+21bh2
-Neutral Axis Formula
The depth of the neutral axis can be expressed as:
![\[x = \frac{(\alpha - 1) \cdot A_s \cdot d + \frac{1}{2} b h^2}{(\alpha - 1) \cdot A_s + b h}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-7eb97978bef426fc3dbe58ad7f1c230f_l3.png "Rendered by QuickLaTeX.com")
where:
–  is the modular ratio,
is the modular ratio,
– is the area of the steel reinforcement,
–  is the width of the concrete section,
is the width of the concrete section,
–  is the height of the concrete section,
is the height of the concrete section,
– is the distance from the section’s top to the steel reinforcement’s centroid.
Moment of Inertia  Formula
Formula
The moment of inertia about the neutral axis is:
![\[I = \frac{b \cdot h^3}{12} + b \cdot h \left( x - \frac{h}{2} \right)^2 + (\alpha - 1) \cdot A_s \cdot (d - x)^2\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-49bf85af2a185cecfdc4be5243ce40e3_l3.png "Rendered by QuickLaTeX.com")
where:
– The first term,  , is the moment of inertia of the concrete section about its centroidal axis,
, is the moment of inertia of the concrete section about its centroidal axis,
– The second term,  , shifts the concrete area’s moment of inertia to the neutral axis,
, shifts the concrete area’s moment of inertia to the neutral axis,
– The third term,  , is the moment of inertia of the transformed steel area about the neutral axis
, is the moment of inertia of the transformed steel area about the neutral axis
-The stresses in concrete
The concrete stress ( f_c ) in terms of the bending moment ( M ), the moment of inertia ( I ), the distance ( x ) from the neutral axis, and the section width ( b ) is expressed as :
![\[f_c = \frac{M}{I} \cdot x\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-b61d42fb1fef4218a6dd84583635c8a5_l3.png "Rendered by QuickLaTeX.com")
where:
- ( f_c ): The stress in the concrete,
- ( M ): The bending moment,
- ( I ): The moment of inertia of the section about the neutral axis,
- ( x ): The distance from the neutral axis .
The expression for  can be written as:
can be written as:
![\[f_c = \frac{M}{I_{\text{id}}} \cdot x\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-aa39024d352a7f1861cbee59bf96540f_l3.png "Rendered by QuickLaTeX.com")
where:
– represents the bending moment,
–  represents a moment of inertia
represents a moment of inertia
– is the distance from the neutral axis.
The stresses in steel
![\[f_t = \frac{M}{I_{\text{id}}} \cdot (h - x)\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-af5e999514af4abc57da1b34b4ea23a9_l3.png "Rendered by QuickLaTeX.com")
where:
– is bending moment,
– represents a moment of inertia ,
– is height of the section,
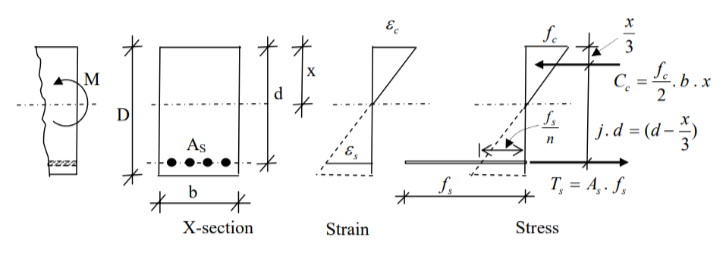
Stage II: Cracked (Serviceability State) also called the work stress method
In Stage II, the concrete’s tensile stress exceeds its tensile strength, leading to cracks in the concrete section. However, the structure remains functional, and serviceability requirements must be satisfied.
Key Assumptions
-Bernoulli’s hypothesis is satisfied i.e the strain distribution is linear
-Hooks law is satisfied or the material is elastic: i.e
![\[\sigma = E \cdot \epsilon\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-4fbff17c3f9500667c514f46a6a6be35_l3.png "Rendered by QuickLaTeX.com")
– Cracking occurs in the tensile region, but the section retains serviceability.
– Concrete in tension is neglected; only steel reinforcement takes tension.
– Stress distribution in the compression zone is linear.
Design Equations for Singly Reinforced Rectangular Section
In a singly reinforced rectangular section, reinforcement is provided only on the tension side. Here are the key steps and equations for determining the neutral axis depth, stress relationships, and moment of resistance.
Assumptions
1. Concrete in tension is neglected, so the reinforcement carries all the tensile stress.
2. Both concrete and steel behave elastically within the working stress range.
3. A perfect bond exists between steel and concrete.
Variables
– : Width of the section
– : Effective depth (distance from the top fiber to the center of the reinforcement)
– : Area of steel reinforcement
–  : Compressive stress in concrete
: Compressive stress in concrete
–  : Tensile stress in steel
: Tensile stress in steel
– : Depth of the neutral axis from the top of the section
– : Applied bending moment
–  : Modular ratio (ratio of Young’s modulus of steel to that of concrete)
: Modular ratio (ratio of Young’s modulus of steel to that of concrete)
a) Determining Neutral Axis Depth
1. Strain Compatibility
From the strain diagram, the ratio of strains in concrete and steel is given by the similarity of triangles:
![\[ \frac{\epsilon_s}{\epsilon_c} = \frac{d - x}{x}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-d9d01993e31bbadf03930192402f29e0_l3.png "Rendered by QuickLaTeX.com")
where  is the strain in steel and
is the strain in steel and  is the strain in concrete.
is the strain in concrete.
2. Stress-Strain Relationship (Hooke’s Law)
In the elastic range, applying Hooke’s law:
![\[\epsilon_c = \frac{f_c}{E_c} \quad \text{and} \quad \epsilon_s = \frac{f_s}{E_s} \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-a7257dc8eadae48e14b978ba02813a00_l3.png "Rendered by QuickLaTeX.com")
Since the modular ratio  is defined as , we can write:
is defined as , we can write:
![\[ \frac{\epsilon_s}{\epsilon_c} = n \cdot \frac{f_c}{f_s} = \frac{d - x}{x}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-522a875c5946941560366dad991e92de_l3.png "Rendered by QuickLaTeX.com")
3. Neutral Axis Depth
Solving for in terms of the modular ratio , concrete stress , and steel stress :
![\[\frac{x}{d} = \frac{n \cdot f_c}{n \cdot f_c + f_s} = k \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-acb3ab77a678f69cd1a93ffffb11f33d_l3.png "Rendered by QuickLaTeX.com")
where  is a ratio indicating the position of the neutral axis. Thus:
is a ratio indicating the position of the neutral axis. Thus:
![\[ x = k \cdot d\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-ee6cdd9820ac6d14ee55533b684e9d77_l3.png "Rendered by QuickLaTeX.com")
b) Equilibrium of Internal Forces
To maintain equilibrium, the compressive force in the concrete  must equal the tensile force in the steel
must equal the tensile force in the steel  :
:
1. Compressive Force in Concrete
The compressive force is given by:
![\[C = \frac{f_c \cdot b \cdot x}{2} \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-b1117a194b275e4bec66f14a0939b574_l3.png "Rendered by QuickLaTeX.com")
2. Tensile Force in Steel
The tensile force in the steel is:
![\[T = A_s \cdot f_s\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-c8786d901f4a0c77e3e94461d94bdc29_l3.png "Rendered by QuickLaTeX.com")
3. Equilibrium Condition
Setting  :
:
![\[ \frac{f_c \cdot b \cdot x}{2} = A_s \cdot f_s\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-61d6c432f41c1c24e905a00941cd031b_l3.png "Rendered by QuickLaTeX.com")
Substituting  :
:
![\[\frac{f_c \cdot b \cdot k \cdot d}{2} = A_s \cdot f_s\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-6f9832e5109efe2bb533b70630112a09_l3.png "Rendered by QuickLaTeX.com")
4. Steel Ratio 
Defining the geometric steel ratio  , we can substitute
, we can substitute  :
:
![\[f_s = \frac{2 f_c \cdot k}{\rho} \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-46c0fcc53d0477f943914e463b2b3de8_l3.png "Rendered by QuickLaTeX.com")
c) Moment of Resistance
The moment of resistance is determined by taking moments of the internal forces about the neutral axis or the center of compression.
1. Lever Arm
The lever arm  is the distance between the line of action of the compressive and tensile forces. It can be defined as:
is the distance between the line of action of the compressive and tensile forces. It can be defined as:
![\[ j = 1 - \frac{k}{3}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-e35f5b13279303a0c76be624f8715e24_l3.png "Rendered by QuickLaTeX.com")
2. Moment of Resistance (Concrete Stress)
The moment of resistance in terms of the concrete stress is:
![\[M = \frac{f_c \cdot b \cdot x}{2} \cdot j \cdot d = f_c \cdot b \cdot k \cdot d^2 \cdot \left(1 - \frac{k}{3}\right)\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-c3b2493b104c8559147d90bac8f1f3f4_l3.png "Rendered by QuickLaTeX.com")
3. Moment of Resistance (Steel Area)
Alternatively, the moment of resistance in terms of the area of steel and steel stress is:
![\[M = A_s \cdot f_s \cdot j \cdot d \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-9cc80c8f438333e19a5874e63d2b73b0_l3.png "Rendered by QuickLaTeX.com")
Substituting  :
:
![\[M = A_s \cdot f_s \cdot d \cdot \left(1 - \frac{k}{3}\right)\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-66d3d113c79dc01fd21020160f248d99_l3.png "Rendered by QuickLaTeX.com")
Summary of Key Equations
– Neutral Axis Depth :
![\[x = \frac{n \cdot f_c \cdot d}{n \cdot f_c + f_s}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-c59b5ad2b1c13ca129c07458c8871642_l3.png "Rendered by QuickLaTeX.com")
– Force Equilibrium:
![\[\frac{f_c \cdot b \cdot x}{2} = A_s \cdot f_s \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-1981f0bbb95054cc9cde3aa7edf0009c_l3.png "Rendered by QuickLaTeX.com")
– Moment of Resistance (Concrete Stress):
![\[M = f_c \cdot b \cdot k \cdot d^2 \cdot \left(1 - \frac{k}{3}\right)\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-00b9fd803e8e1918974f8d8a49778028_l3.png "Rendered by QuickLaTeX.com")
– Moment of Resistance (Steel Area):
These equations provide the fundamental relationships for analyzing and designing singly reinforced rectangular sections under bending.
The expression for :
![\[k = -(\rho \cdot n) + \sqrt{(\rho \cdot n)^2 + (2 \rho \cdot n)}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-3a54588d4615b7303d813e22e3c97f65_l3.png "Rendered by QuickLaTeX.com")
is derived from a quadratic equation that typically arises in analyzing a singly reinforced concrete section.
Derivation of Using Force Equilibrium
1. Force Equilibrium in the Section:
For a singly reinforced rectangular section, the compressive force in the concrete must balance the tensile force in the steel .
2. Expressing Forces:
– The compressive force in the concrete (assuming a rectangular stress block) is:
![\[C = 0.5 \cdot f_c \cdot b \cdot x\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-0b0556f4279717ad20031a923f1d93cb_l3.png "Rendered by QuickLaTeX.com")
where is the concrete stress, is the width of the section, and is the depth of the neutral axis.
– The tensile force in the steel reinforcement is:
where is the area of the steel reinforcement, and is the stress in the steel.
3. Using the Modular Ratio and Reinforcement Ratio:
– Define the modular ratio , where  and
and  are the moduli of elasticity for steel and concrete, respectively.
are the moduli of elasticity for steel and concrete, respectively.
– Let , where is the area of the steel reinforcement and is the effective depth.
4. Setting Up the Equilibrium Equation:
Since , we have:
![\[0.5 \cdot f_c \cdot b \cdot x = A_s \cdot f_s\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-4b8b022424b869c0ad5149800278565b_l3.png "Rendered by QuickLaTeX.com")
5. Expressing in terms of :
Using the relationship  , we get:
, we get:
![\[ 0.5 \cdot f_c \cdot b \cdot x = \rho \cdot b \cdot d \cdot (n \cdot f_c) \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-f74f104f25547f4e290554acdada8116_l3.png "Rendered by QuickLaTeX.com")
6. Solving for :
Cancelling and , we obtain:
![\[0.5 \cdot x = \rho \cdot n \cdot d \]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-5bf69cac7c73eba9f44f0cf55486e216_l3.png "Rendered by QuickLaTeX.com")
By substituting , this equation can be rearranged into a standard quadratic form:
![\[k^2 - (\rho \cdot n) \cdot k - (2 \rho \cdot n) = 0\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-1135de417f349516cbbc62891c435663_l3.png "Rendered by QuickLaTeX.com")
7. Solving the Quadratic Equation:
Solving for using the quadratic formula  , with
, with  ,
,  , and
, and  , gives:
, gives:
![\[k = -(-\rho \cdot n) \pm \sqrt{(\rho \cdot n)^2 + 2 \rho \cdot n}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-e603ebe1d01794c1a17f24e816754cff_l3.png "Rendered by QuickLaTeX.com")
Simplifying this, we get:
![\[k = (\rho \cdot n) + \sqrt{(\rho \cdot n)^2 + 2 \rho \cdot n}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-5bf123ab52ead3c628c03bd4c7ca20f7_l3.png "Rendered by QuickLaTeX.com")
Since we are looking for the positive root that gives a physical result, we discard the negative option:
![\[k = -(\rho \cdot n) + \sqrt{(\rho \cdot n)^2 + 2 \rho \cdot n}\]](https://civengtech.com/wp-content/ql-cache/quicklatex.com-8f6e98d11414284e15498e9a85eb5f73_l3.png "Rendered by QuickLaTeX.com")
Stage III: Ultimate Limit State (Failure)
At the ultimate limit state, the structure is designed to prevent collapse by reaching its maximum load-bearing capacity. This stage considers nonlinear behavior and ultimate strength, making it crucial for safety.
Key Assumptions
– Concrete in compression follows a nonlinear stress-strain curve.
– Tensile concrete is ignored.
– A parabolic-rectangular stress distribution is assumed for concrete.
The steps of the Eurocode design standard
1. Initial Parameters and Variables:
– Values for λ and η depend on fck (concrete characteristic strength)
– λ = 0.8 for fck ≤ 50 MPa
– λ = 0.8 – (fck – 50)/400 for 50 < fck ≤ 90 MPa
– η = 1.0 for fck ≤ 50 MPa
– η = 1.0 – (fck – 50)/200 for 50 < fck ≤ 90 MPa
2. Compression and Tension Forces:
– Total compression force in concrete: C = (λx) × b × (η*fcd)
– Tension force in steel: T = As fs
– Where fcd = fck/γc, γc = 1.5
– kc = C/(bd* fcd) = 0.667 λ × η × (x/d)
3. Lever Arm Calculation:
– z = d – 0.5 λx
– z/d = 1 – 0.5 λ(x/d)
4. Moment of Resistance:
– Applied moment M = C × z = (λx) × b × (η* fcd) × (d – 0.5 λx)
– k = M/(bd²fck) = (η/1.5) × α × (1-0.5α), where α = x/d
5. Solution Process:
– Rearranging gives quadratic equation: α² – 2α + 3k/η = 0
– Solving for α: α = 1 – √(1-3k/η)
– Final z/d ratio: z/d = 1-0.5α = 0.5{1.0 + √(1-3k/η)}
6. Equilibrium Conditions:
– Internal equilibrium requires T = C
– Forces T and C form a couple with lever arm z
– M = T×z = As fs×z
– Required steel area: As = M/(fs×z)
These steps form the basis for designing rectangular reinforced concrete sections according to Eurocode standards.
Designing concrete structures according to European standards involves understanding each stage of concrete behavior and applying the right formulas to ensure safety and durability. The design of concrete elements is currently done using the limit state method that is based on the concrete behavior in the third state of loading. However, it is important to grasp the behavior of concrete during all loading states so that the structural engineer understands and correctly judges the needs of different civil engineering projects.